
Controlling Servo with Potentiometer
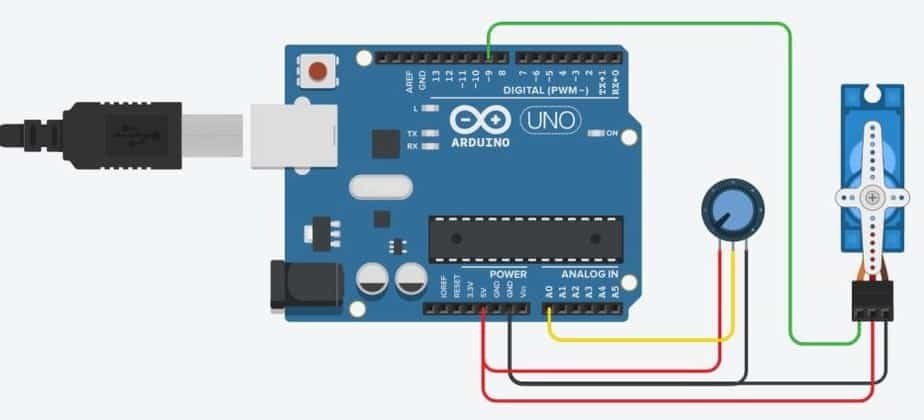
controlling servo with potentiometer arduino
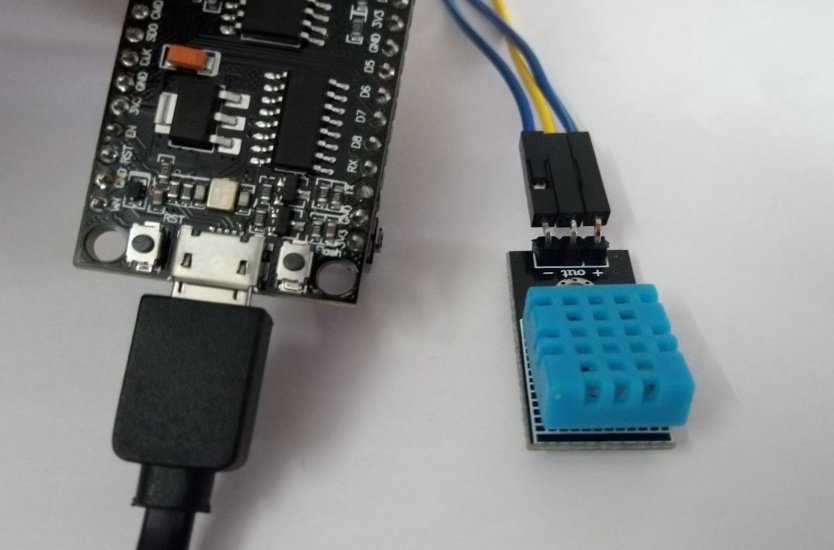
Interfacing DHT11 with NodeMcu ESP8266 and using Ubidots Cloud In this tutorial, we discuss how to Interface DHT11 with NodeMcu ESP8266 and Sending its Data to Ubidots Cloud. Ubidots is an IoT(Internet of Things) data analytics and visualization company. We turn sensor data into information that matters for business-decisions, machine-to-machine interactions, educational research, and increase …
Interfacing DHT11 with NodeMcu ESP8266 and using Ubidots Cloud Read More »

How to use Arduino Analog Input In this tutorial, you will learn about How to use Arduino Analog Input along with the practice example. Analog input is to get data from analog sensors into our Arduino. Since most of the sensors are analog, it is quite important to get our basics clear. Let’s begin with …
How to use Arduino Analog Input – Theory and Practical Read More »

INTERFACING OF ARDUINO UNO WITH ULTRASONIC SENSOR Complete arduino kit for beginners This tutorial is about the interfacing of the Arduino UNO board with HC-SR04 commonly known as ultrasonic sensor and code to run the sensor and obtain the output from the sensor accordingly. List of the components Arduino uno board HC-SR04 ultrasonic senso Bread …
Interfacing of HC-SR04 Ultrasonic Sensor with Arduino Uno Read More »
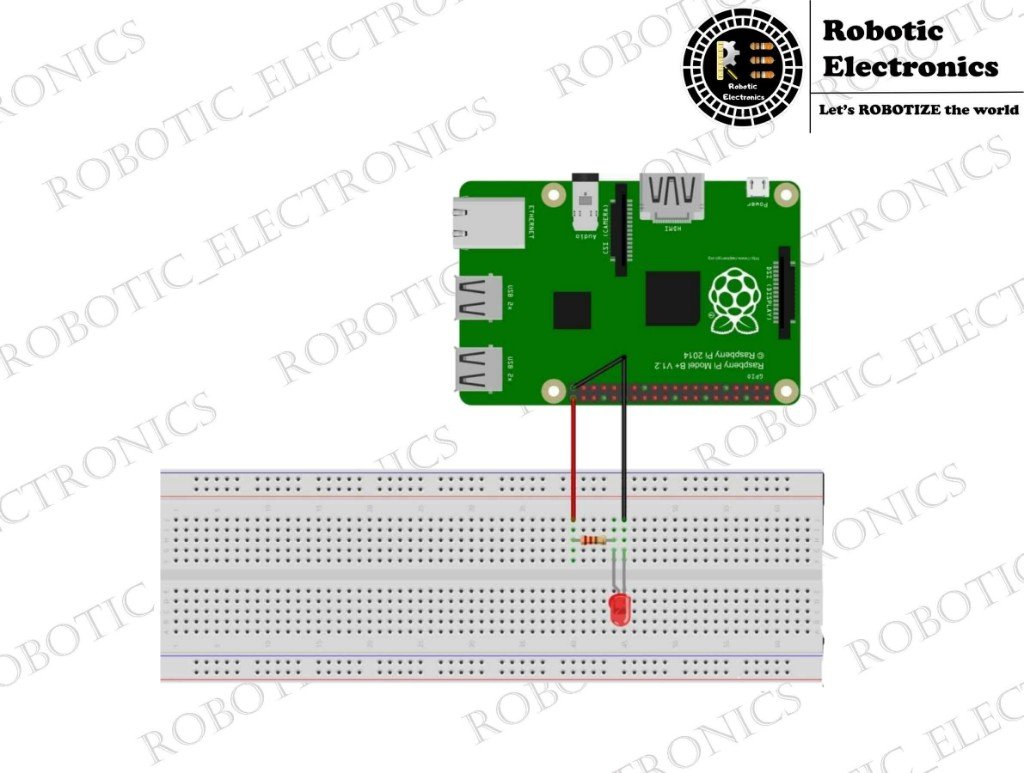
How to blink an led with Raspberry pi 3B+ Introduction In this tutorial, you will learn how to connect the LED with the Raspberry pi, a microprocessor board commonly known as a single board computer and write the code to the board and control the accordingly. About Raspberry pi 3B+ Raspberry pi is an ARM …

NodeMCU ESP8266 with AWS IoT Core using Arduino IDE & MQTT In this tutorial, I will tell you How to connect NodeMCU ESP8266 with AWS IoT Core using Arduino IDE and MQTT Protocol. In this process, we will see how to create a thing in AWS IoT core, generating certificates and policy, How all AWS …
NodeMCU ESP8266 with AWS IoT Core using Arduino IDE & MQTT Read More »
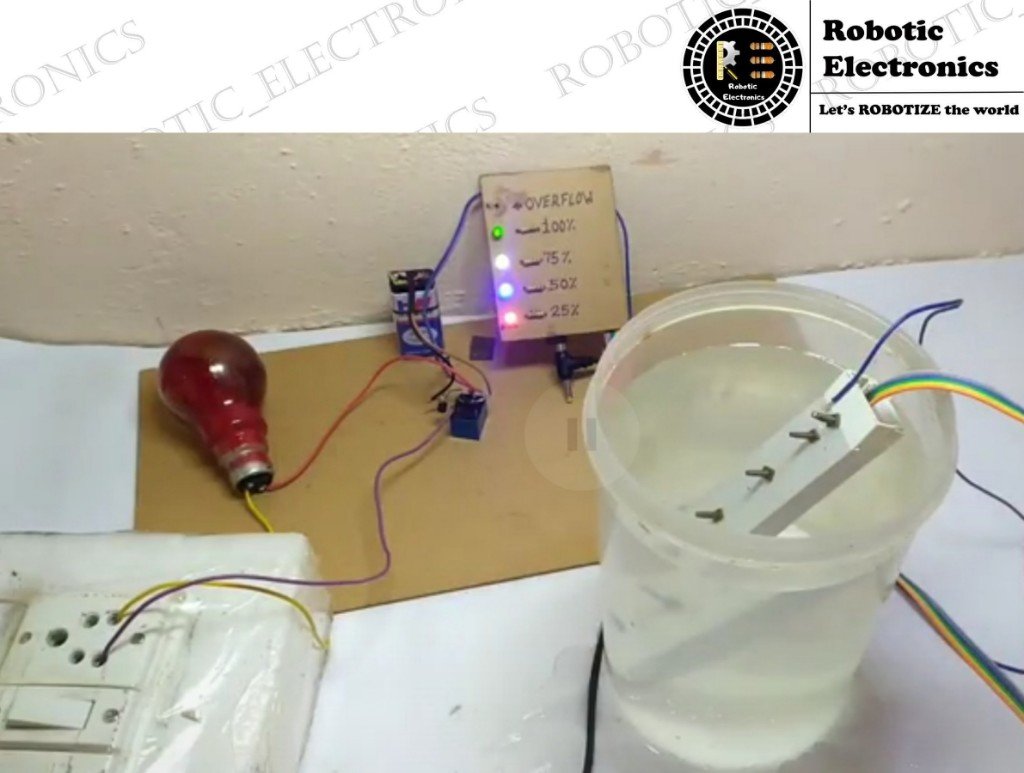
Automatic Submersible Pump Starter We are going to make a very good project to save water and electricity. We turn on the submersible pump in our houses and our water tank starts filling up and sometimes we forget to turn off the motor so today we are going to make a project so that, when the …

OBSTACLE AVOIDING ROBOT What are we going to build? We will build a simple obstacle avoiding robot that will avoid obstacles which are in its path. There can be two possible robots that can be built:- 1. A simple robot with no rotation of the distance sensor. 2. A mediocre robot with the rotation of …
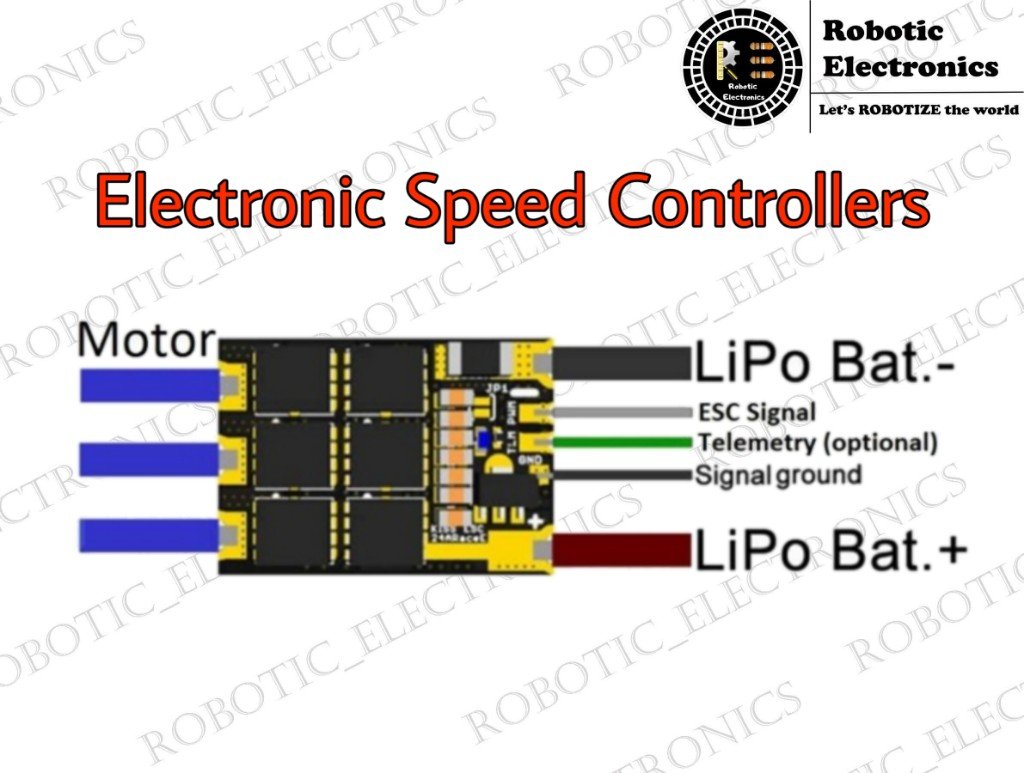
ELECTRONIC SPEED CONTROLLERS In this tutorial about electronic speed controllers (ESC) for drones is expalined. It is a hard-working, powerful component in the drone. It is an electronic circuit that controls and regulates the speed of a motor. It connects the flight controller and a brushless motor. As the brushless motor lacks the brush, they …

Line Follower Robot Welcome to robotic electronics. Here, we begin with a Line Follower Robot. Once, a person in England thought of making a mobile bot as a line follower robot and prepared an Electro-Light-Sensitive-Internal-External(ELSIE) in 1953, which follows a light source using a mechanical feedback system with no intelligence. There kickoff the evolution of …